Our mission is to develop the fundamental building blocks of perception, manipulation, learning, and human-robot interaction to enable robots to perform complex physical manipulation tasks under clutter and uncertainty with and around people.
Our lab was founded by Professor Siddhartha Srinivasa in 2006 with funding from Intel Pittsburgh and the Quality of Life Technologies NSF ERC.
Meet Our Robots!

ADA
ADA, the Assistive Dexterous Arm, mimics equipment used in real homes by people with mobility impairments. It consists of a Kinova JACO robotic arm augmented with a custom eye-in-hand system and mounted on a powered ROVI Mobility wheelchair. It is the main platform for our research thrust on assistive robotics and, specifically, robot-assisted feeding for people with upper-extremity impairments. We expect to begin deploying this system in users homes by Fall 2023.

MuSHR
Our goal is to democratize robotics with MuSHR, the Multi-agent System for non-Holonomic Racing. We created a low-cost racecar platform with open-source software, tutorials, and class assignments. We want anyone from high school students to Ph.D. researchers to be able to learn about and perform research in robotics. We built a community around MuSHR to facilitate learning, research, and development of the platform. Each MuSHR racecar is fitted with a full-suspension base, IMU, NVIDIA Jetson Nano, YDLIDAR laser scanner, and Intel RealSense RGBD camera. We have over 30 racecars in our fleet.
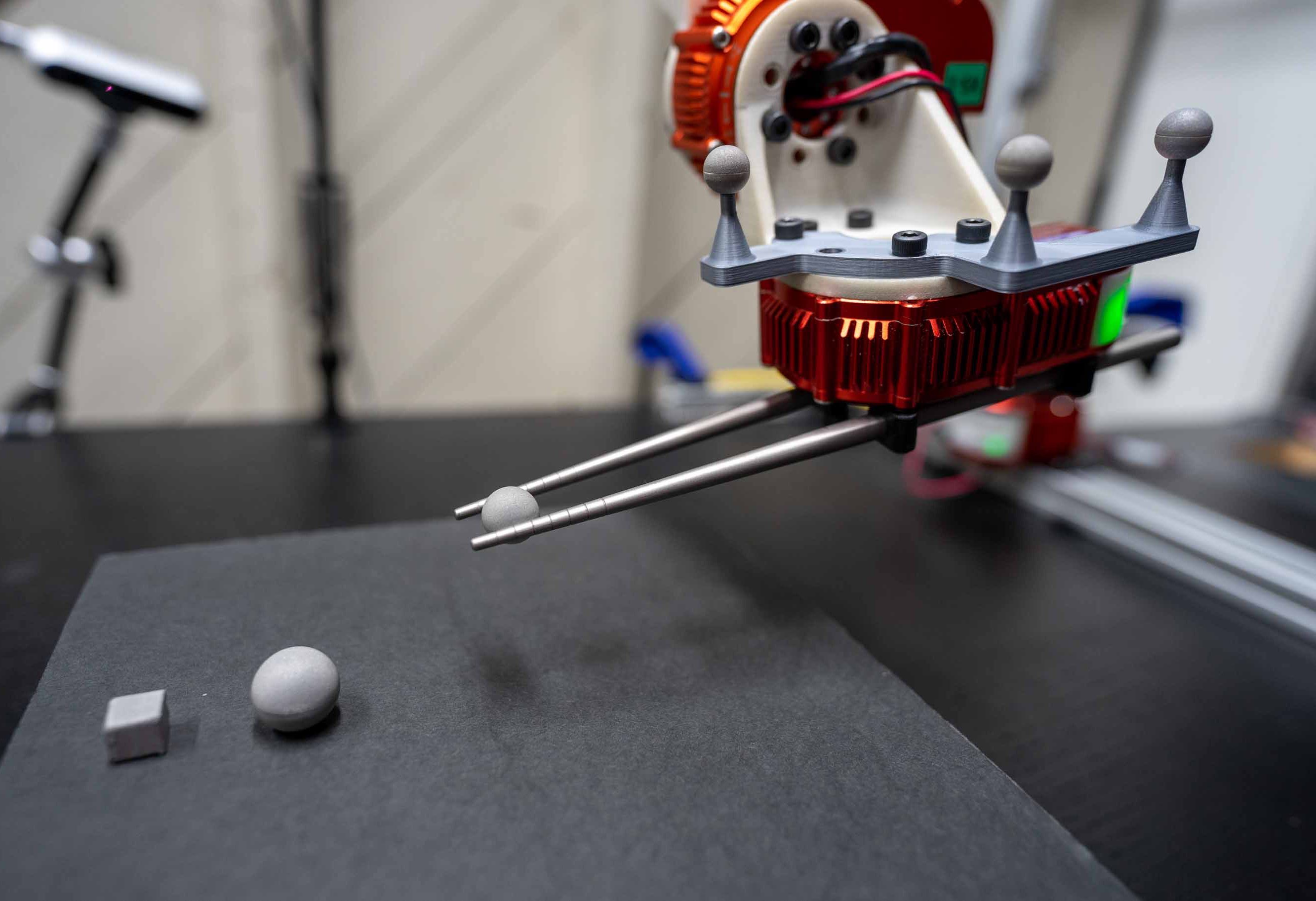
Tycho
Billions of people use chopsticks, a simple yet versatile tool, for fine manipulation of everyday objects. We built a chopsticks-equipped robot and are leveraging human demonstrations to develop autonomous manipulation strategies to pick up challenging items.

RACER
RACER, Robotic Autonomy in Complex Environments with Resiliency, is a DARPA funded program to develop autonomous offroad systems. The UW team is comprised of members from four labs: Robot Learning Lab, Robot State Estimation Lab, Personal Robotics Lab, and the Applied Physics Lab. Our robot is provided a goal point kilometers away and is asked to get there as fast as possible while minimizing the number of human interventions. Checkout the UW RACER Website for more info and videos!
Legacy Systems

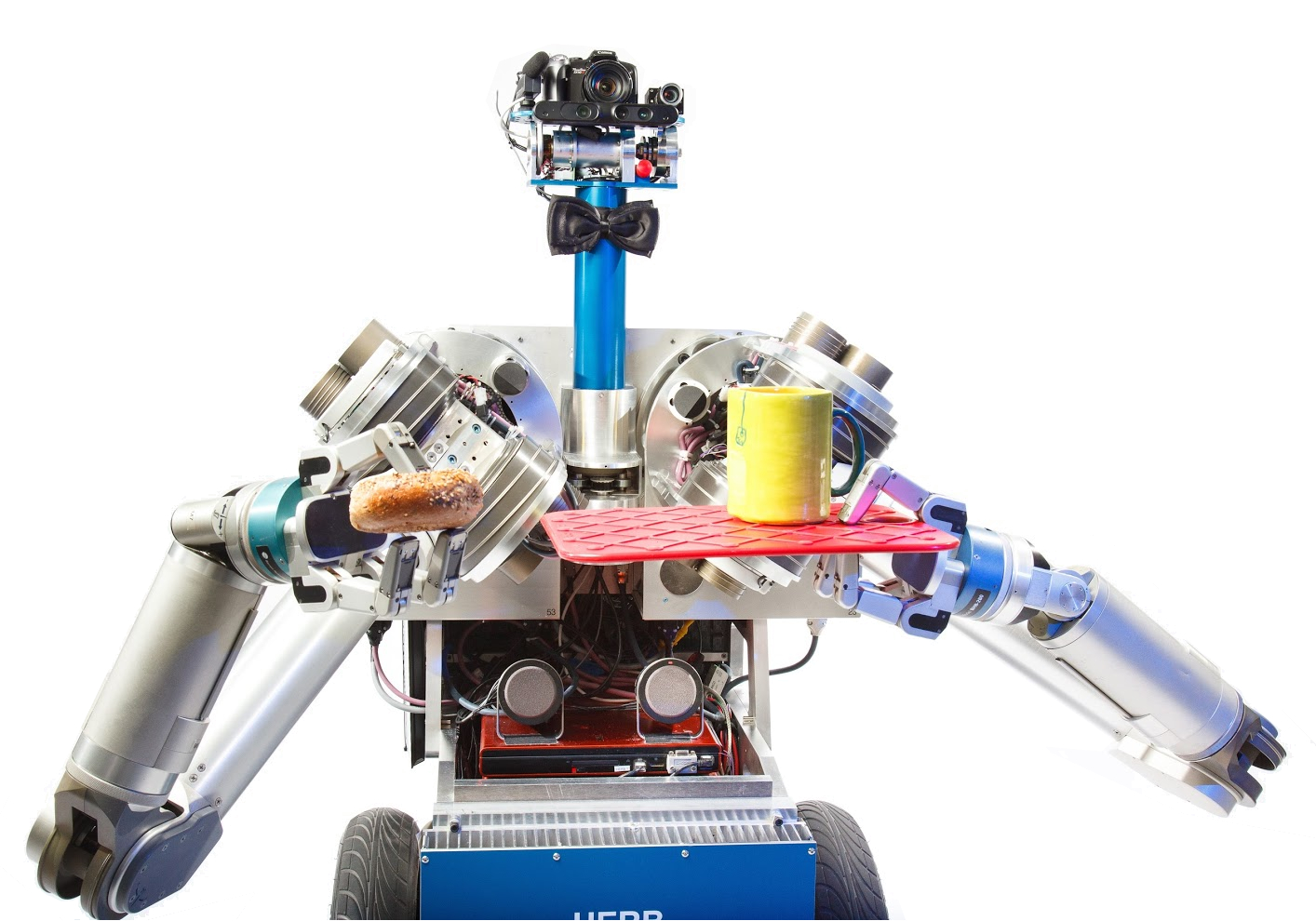
HERB
HERB, the Home Exploring Robot Butler, serves as the realistic testbed for all of our algorithms and as a focal point of our industry and academic collaborations. It is a bimanual mobile manipulator comprised of two Barrett WAM arms on a Neobotix base. It is equipped with a suite of image and range sensors, including the Carnegie Robotics MultiSense SL and Microsoft Kinect 2.

Kuri
Kuri is the cute, low-cost mobile home robot developed by Mayfield Robotics. We use Kuri to study algorithmic and empirical aspects of human-robot interaction including: robots asking humans for help, human perceptions about robots, and social navigation.